showing results for example stereo record 0504_18-05-14


A correlation based shift applied to the right image as rectfication.
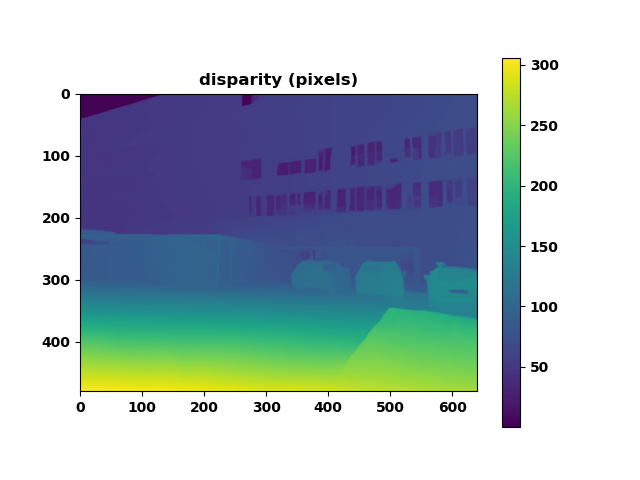
Disparity calculation is performed with the RAFT stereo alogirthm
(see RAFT paper of Lipson, Teed and Deng )
implementation from github.com/princeton-vl/RAFT-Stereo .
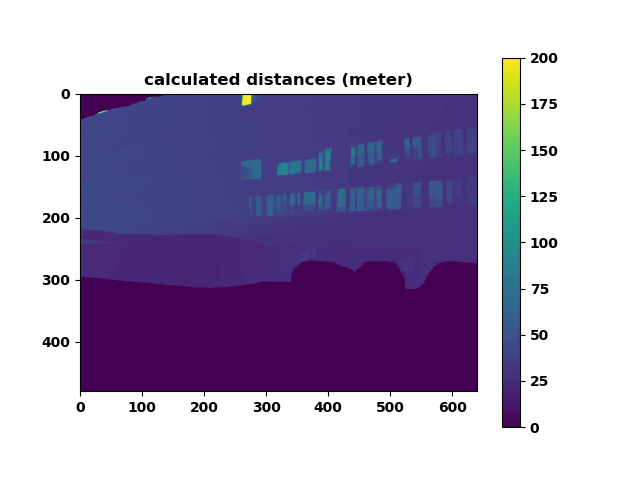
The distance in meter is calculated with the parameters of a Samsung S7 camera (FOV 41 degree.).
The distance map is masked for the pixels of the building objects.
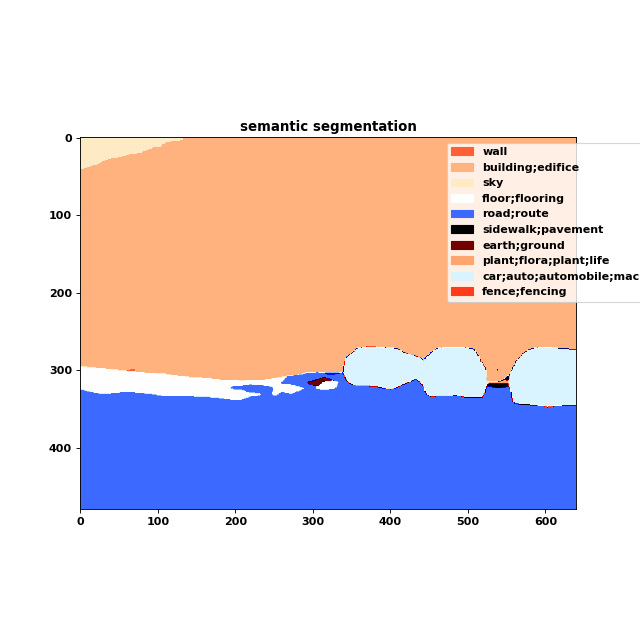
For the segmentation the moidel trained for the ADE20K was used. for the labels see
ADE20k labels.
The resulting depth map converted to point a 3D cloud: